
Autonomous Exploration and Semantic Updating of Large-Scale Indoor Environments
Sai Haneesh Allu, Itay Kadosh, Tyler Summers, Yu Xiang
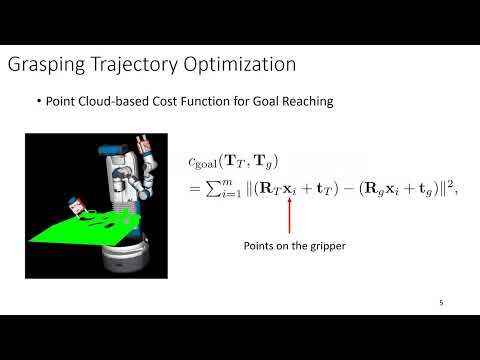
Grasping Trajectory Optimization with Point Clouds
Yu Xiang, Sai Haneesh Allu, Rohith Peddi, Tyler Summers, Vibhav Gogate

SCENEREPLICA: Benchmarking Real-World Robot Manipulation by Creating Reproducible Scenes
Ninad Khargonkar*, Sai Haneesh Allu*, Yangxiao Lu, Balakrishnan Prabhakaran, Yu Xiang

Masters Thesis: Formation Control of Quadcopters
Sai Haneesh Allu, Shubhendu Bhasin